
Matematik
Kranlast
Opgaven i vedhæftede dokument kan jeg ikke rigtig se hvordan skulle løses, jeg ville være glad for hvis du/i kunne hjælpe mig med det. Der skal nok gåes ud fra, at hver meter skal opfattes som en afstand i et koordinatsystem med samme værdi, altså en meter i den vandrette retning, ville have værdien "1" i x aksens retning.
mvh.
Svar #1
14. februar 2015 af peter lind
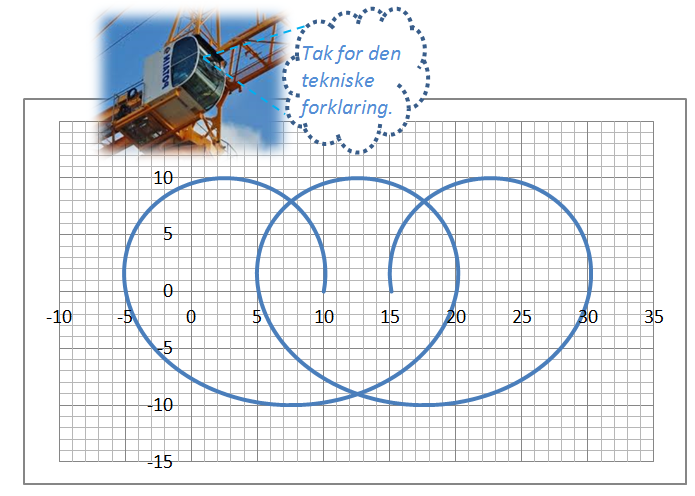
a) Bevægelsen er sammensat af kranens bevægelse på skinneren og drejningen af kranen
Find en vektorbeskrivelse af kranens bevægelse i x retningen.
Find en vektorbeskrivelse af byrden i forhold til kranens position
Adder de to vektorbeskrivelse
Svar #2
14. februar 2015 af hesch (Slettet)
#0: Hvor lang er den lodrette del af wiren, som krogen/byrden hænger i ?
Når kranen svinger rundt, vil den lodrette del af wiren jo ikke længere være lodret. Så byrdens svingradius vil blive mere end de 10m. Men hvor meget?
Svar #3
14. februar 2015 af RobinHansen
Jeg får ikke opgivet hvor lang wiren er, så det der bedes om kunne vel egentligt beskrives som vektorfunktion for bevægeslen af armens spids.
Svar #4
14. februar 2015 af peter lind
#2 Det er ikke angivet i opgaven, så det må antages noget urealistisk, at det er lodret
Svar #5
14. februar 2015 af SuneChr
Kranføreren må formodes at betjene kranen i så bløde vendinger, at store udsving af wiren i en konisk cirkulation ses der bort fra.
Her kunne så, i en anden opgave, komme dét ekstra ind i parameterfremstillingen.
Svar #6
14. februar 2015 af hesch (Slettet)
#5: Jeg ved snart ikke, om 0,5 radianer/sek er en "blød vending" med en kran. :)
Svar #7
14. februar 2015 af SuneChr
# 6 Det hele retfærdiggøres vel af, at udlæggeren "kun" er 10 m , og dermed byrdens svingradius ≤ 10 m.
Svar #8
14. februar 2015 af RobinHansen
Mange tak folkens, for at svare, men altså, vektorfunktionen for byrdens bevægelse, ville jo så, som sagt være sammensætningen af vektoren for kranens bevægelse i x-aksens retning, og vektoren for byrden i forhold til kranens position.
Jeg forstår vel at vektorfunktionen for kranen på x-aksen må være ![\binom{0,8[m/s]*t}{0}](https://media.studieportalen.dk/images/equations/BdERxkzW2sQ5P_f-IzYhRA==.gif)
Men er ret i tvivl med vektorfunktionen for byrden, er det  ??
??
Svar #9
14. februar 2015 af Andersen11 (Slettet)
#8
Du skal gange byrdens vektorfunktion med radius i svingarmen. Til sidst skal du lægge de to vektorfunktioner sammen.
Svar #10
14. februar 2015 af hesch (Slettet)
#7: Det er da ikke rigtigt. Hvis man antager, at wirelængden mellem udlæggerens spids og byrde er 5 m, finder jeg at byrdens svingradius bliver ca. 11,39 m ved ω = 0,5 rad/s.
Wiren vil danne en vinkel på ca. 16,17º med lodret, og byrden vil derfor bevæge sig på en cirkel med større radius end udlæggerens længde. Jo større wirelængde, jo større bliver byrdens svingradius.
Svar #11
14. februar 2015 af hesch (Slettet)
Svar #12
15. februar 2015 af SuneChr
# 10
Jeg forstår dit indlæg, og tak for kalkulationen heri. Jeg har sikkert, i # 7, fejlagtigt anvendt "svingradius" som afstanden fra udlæggerens omdrejningspunkt, centrum, til punktet ude på udlæggeren, momentarmen, hvorfra wiren, i ro, bærer byrden.
Svar #13
15. februar 2015 af hesch (Slettet)
#12: Sådanne byrder, hængende i en kranwire er svære at holde "i ro" (svinger ikke). Man har derfor ofte elektroniske regulatorer (computere) i kraner, svarende til en "ESP" i en bil, således at kranen næsten udfører de bevægelser som kranføreren forlanger, men også kun næsten.
Når kranføreren således stopper en bevægelse fremad, stopper regulatoren bevægelsen hurtigere end tilsigtet, venter på at byrden svinger fremad (startende en svingning). Lige før byrden når maksimum i udsvinget, kører kranen så et ryk fremad og stopper igen, nu med byrden hængende lodret ned og i ro.
Regulatoren regulerer ud fra førerens håndtag, wirelænge, vinkel på wiren og måske lidt sidevind.
I et tilfælde, hvor en havnekran skulle testes, tændte man så computeren, der regulerede vha. tilstandsvariable (statespace). Men computeren vågnede op med alle disse variable forkert indstillede (sikkert nulstillede), og computeren forsøgte nu at "finde balancen" ved at køre frem og tilbage og svinge vildt med udlæggeren, og nåede under disse manøvrer meget tæt på kajkanten, inden den faldt til ro.
Der var noget designeren af reguleringsprogrammet havde "glemt".
{kind=link}
Skriv et svar til: Kranlast
Du skal være logget ind, for at skrive et svar til dette spørgsmål. Klik her for at logge ind.
Har du ikke en bruger på Studieportalen.dk?
Klik her for at oprette en bruger.